
Craig
Ackerman
Design and Engineering Portfolio
Mechanical Engineer with a Minor in Industrial Design from Georgia Tech
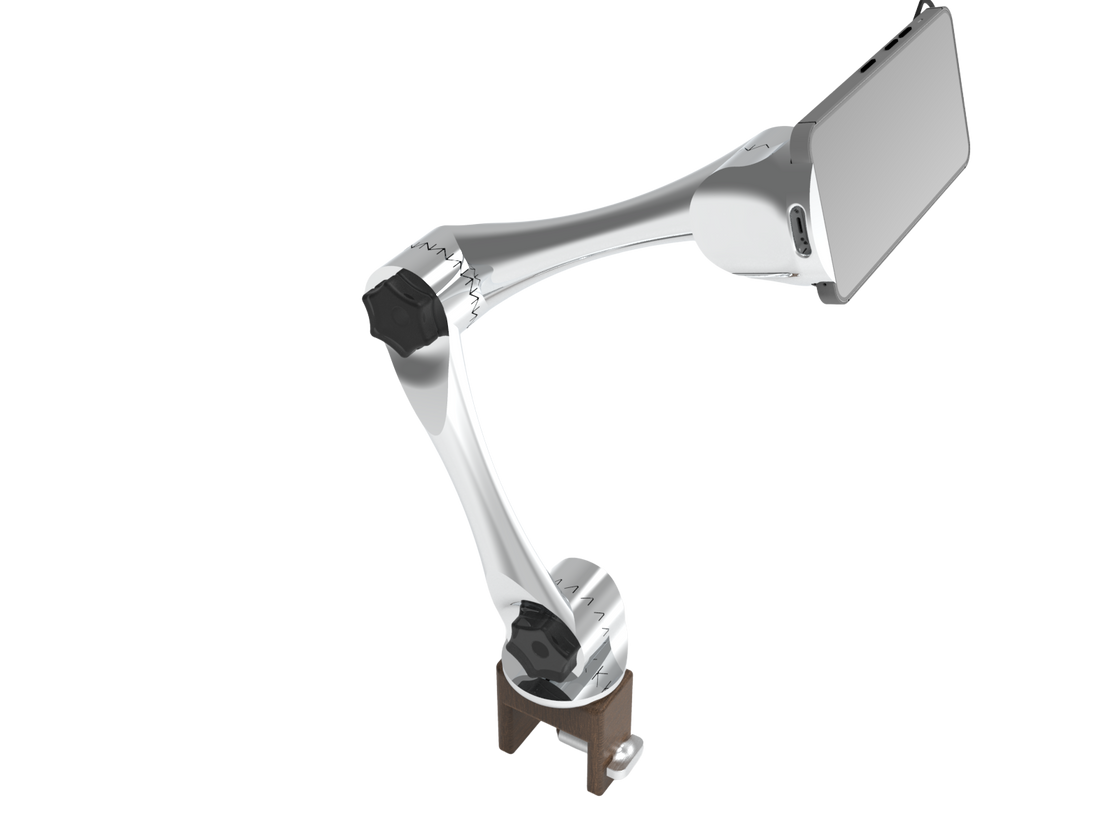
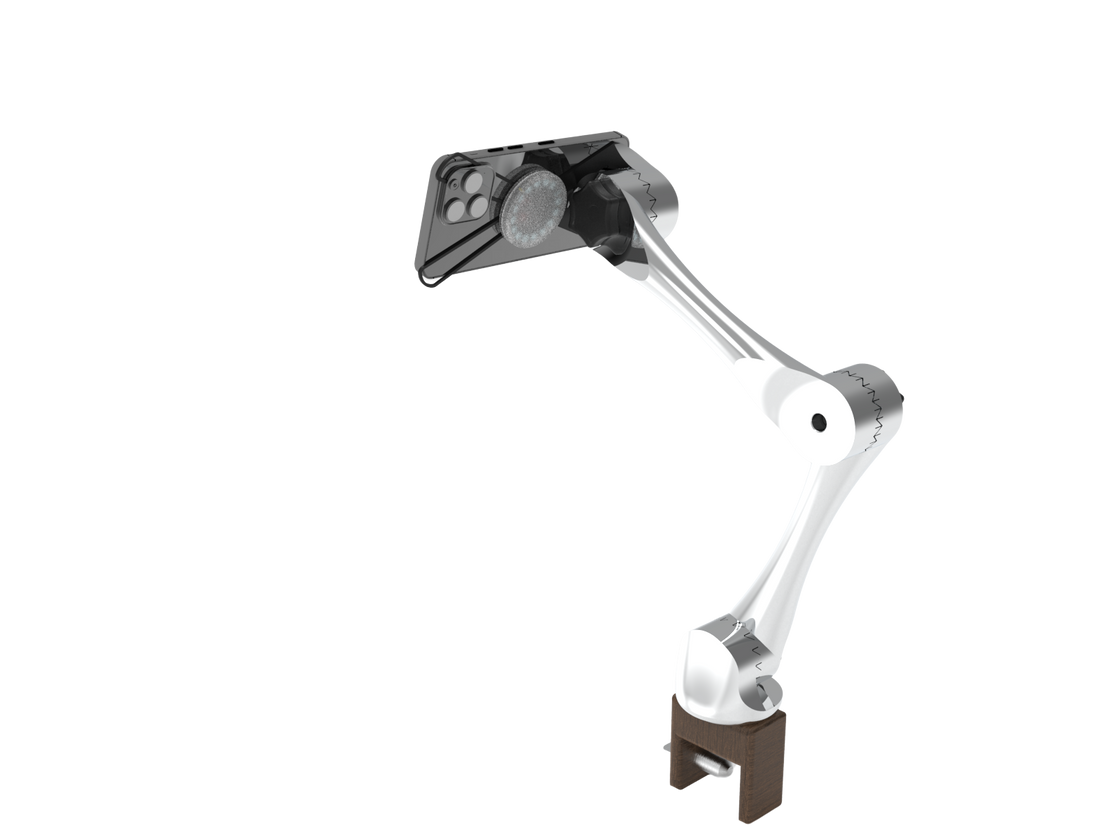
Device Cradle
Designed to accomodate the IPhone 14 Pro and similarly sized phones, this architects lamp inspired cradle functions as an aposable armature to watch videos or lectures from any viewing position. With two linkages and four joints, the phone can be raised/lowered and rotated around the mounting braket as it clamps to a headboard or desk. Additionally mounted behind the phone is a ring of programmable LEDs to play ambient lighting associated with whats on the screen.
Still in progress. Shown here is the most recent iteration.



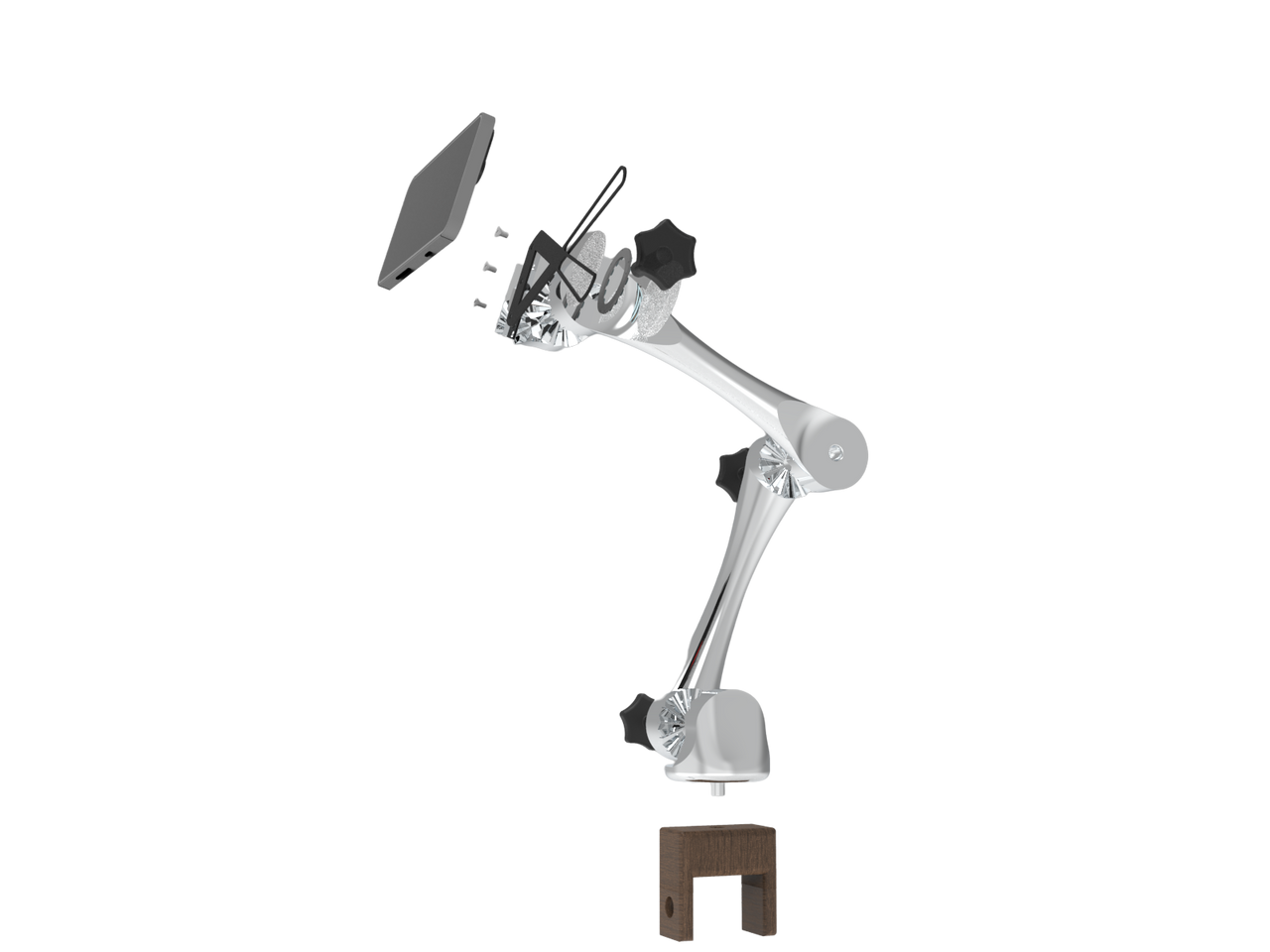

Linkage 2
Linkage 1
Joint Screw X3
C-Clamp
Base Joint
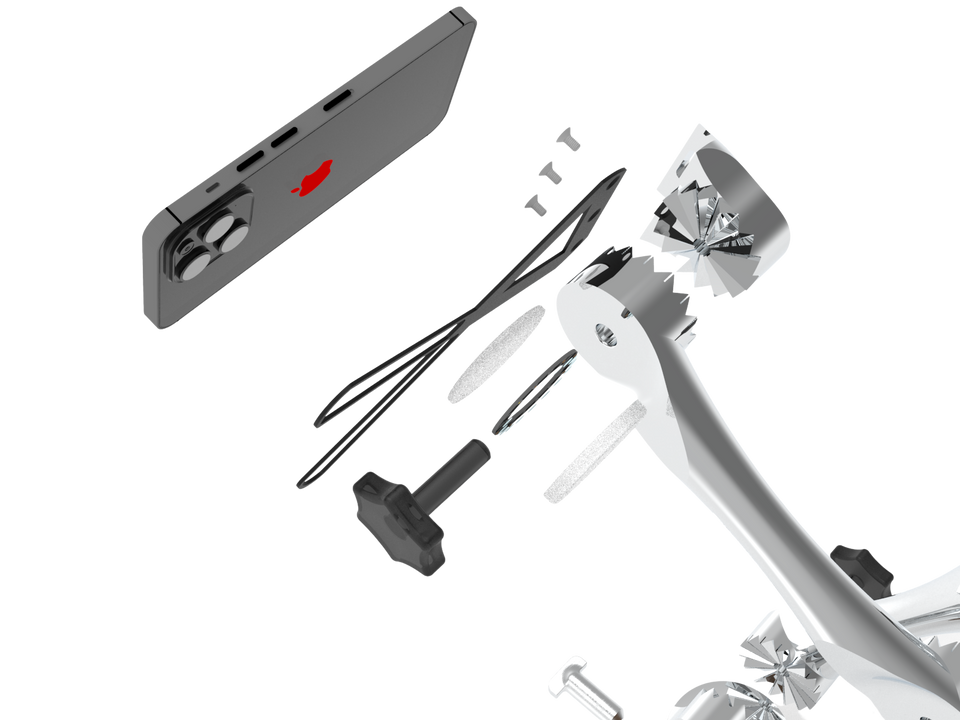
Rubber Phone Clasp
MC and LED Enclosure
C-CLamp Screw
MAchine Screws
End Joint
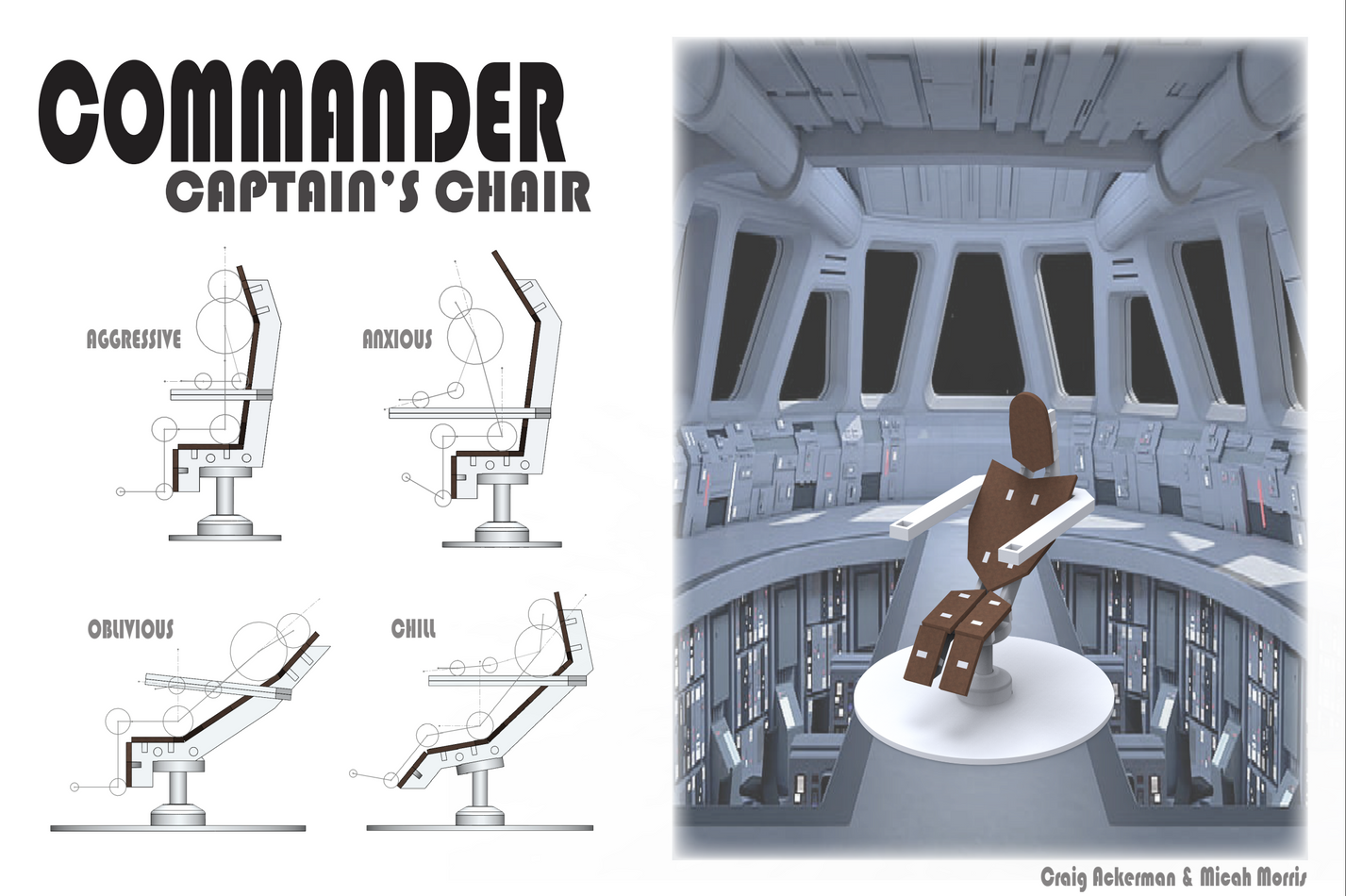
Parametric Chair
This project involved creating a parametrically linked chair that is capable of changing both size and configuration by only modifying a set number of dimensions. As a result, the Commander is a captians chair influenced by Star Trek furniture and is able to change between 4 different seating configurations determined by moods: Aggressive, Anxious, Oblivious, and Chill. It is also able to adapt to different body dimensions of various action figures ranging fron The Mandalorian(as shown) to Barbie.
All dimensions of the chair are linked to the 3D skeleton shown in the project's poster below. The model was completed in Solidworks then laser cut/3D printed.

Parametric Phone Case
Done in Autodesk Fusion 360 and 3D printed, the goal was to develope a "powered" phone/ tablet case that is able to parametrically change its dimensions to fit a variety of devices and batteries. This case is currently modeled to fit an Iphone 11 through the modification of only 3 dimensions: Height, Width and Length, as well as a C battery.

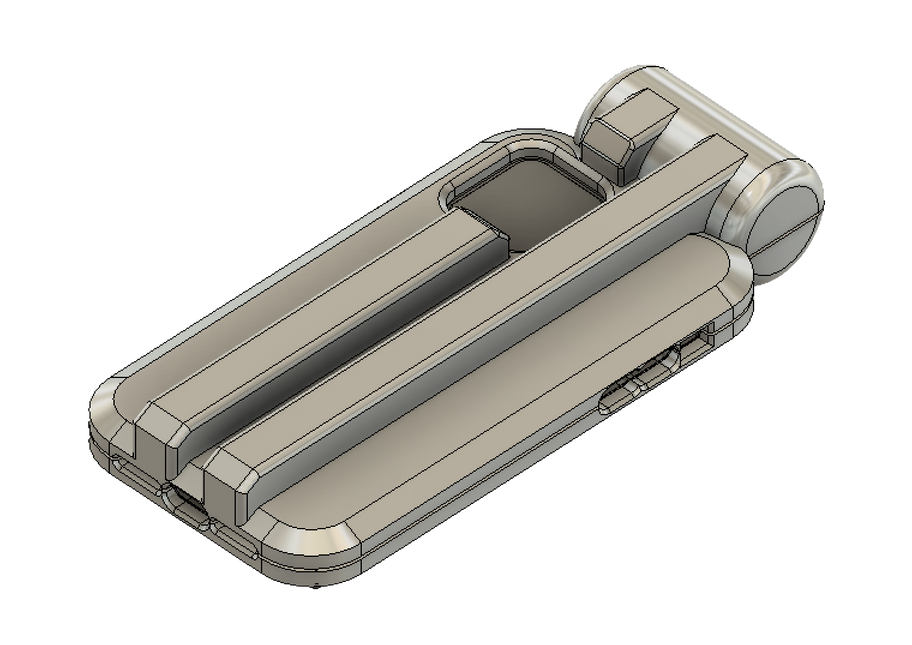
The design of this case was influenced by the need to fit a battery without making te case too unwieldy. Taking inspiration from hiking backpacks witch place the sleeping bag atop the backpack, this case puts the battery in line with the phone and reinforces the pockets wit two spines running the length of the case. As shown below the case include a four piece design with a two piece rubber gasket for impact absorbtion and a two piece hardshell.
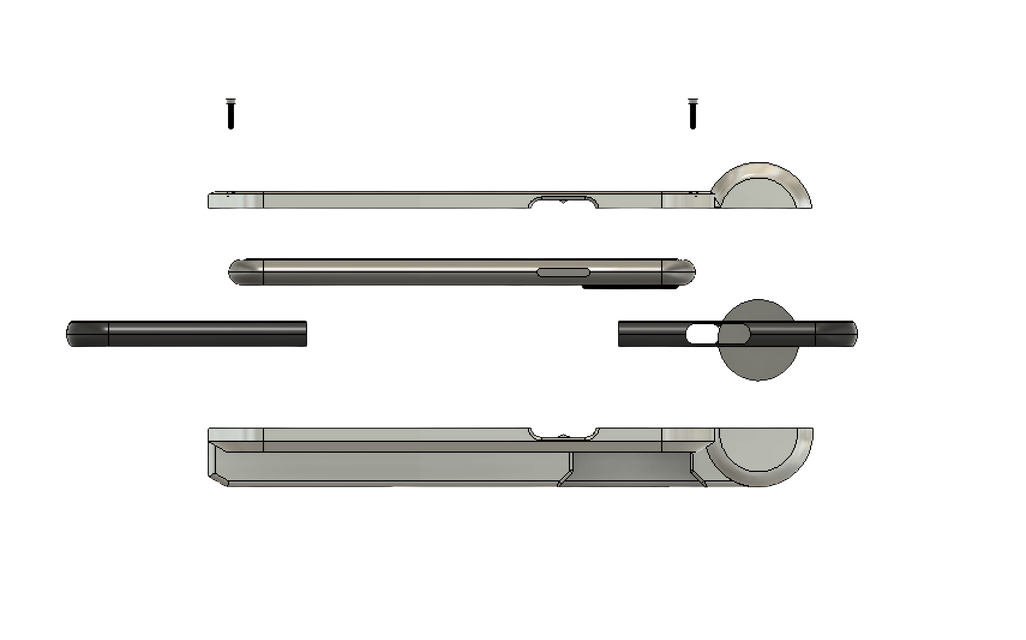

Iphone 11
Machine Screws (X4)
Top Hardshell

C-Battery
Rubber Gasket
Bottom Hardshell
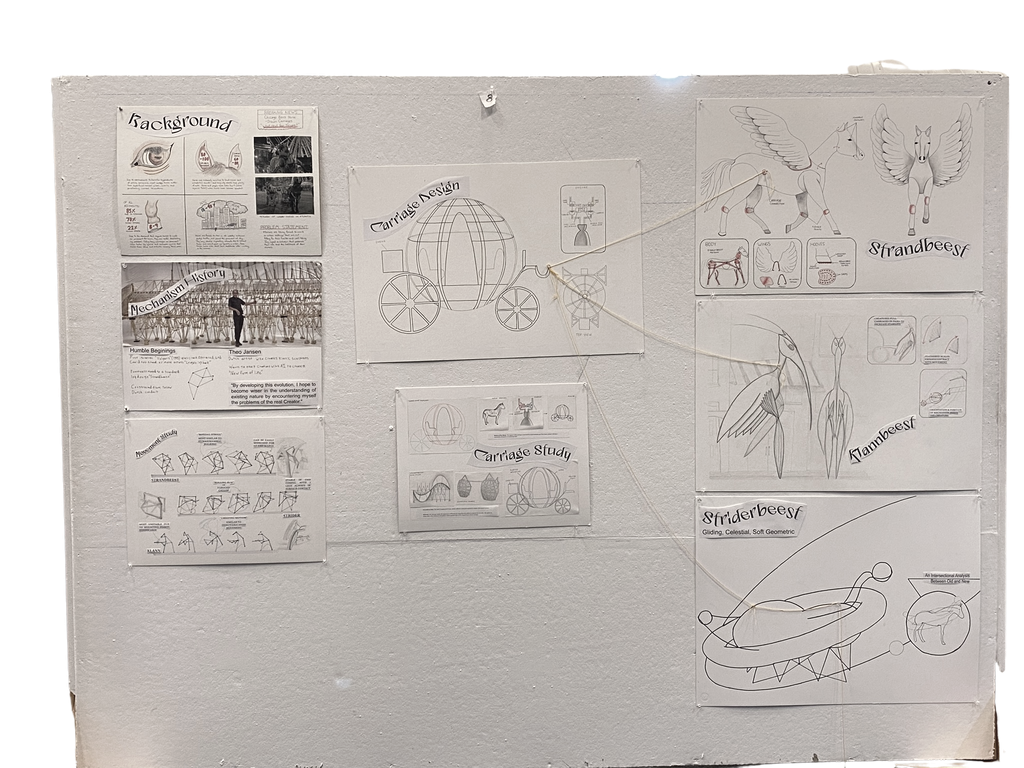
StreetBeests
The prompt for this project was to develop a conceptual solution to any problem and present it on hand draw posters. As a result:
In downtown Atlanta, horsedrawn carriages are still a popular tourist attraction. However, horses in urban environments suffer from a plethora of aliments. The hard asfault can hurt their hooves and their stables suffer from poor air quality. As a solution, I and my team decided to solve this issue by removing the horse from the picture completely but keeping the whimsy by replacing them with Straandbeests. Straandbeests are fully mechanical walking structures developed by Theo Jansen a Dutch Artist. I was personally responsible for a poster on the different types of strandbeest walking types and the creation of Klaanbeest, one of the three substitute carriage pullers.
Engineering Work
Classwork
Internships
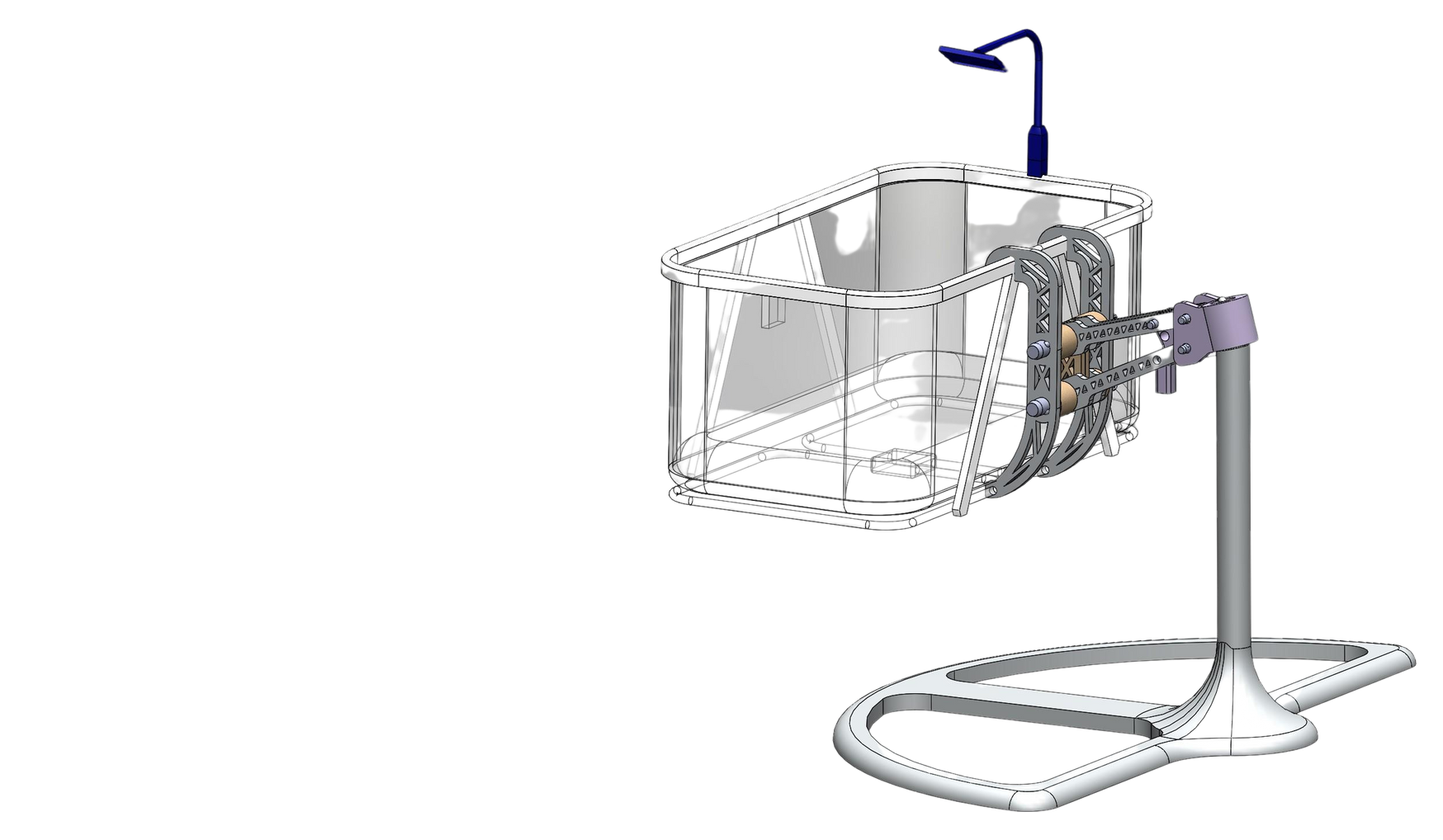
Somnus Sleeper
In 2019 an investigation linked the death of over a dozen infants to the design of a popular inclined sleeper, leading to the recall of approximately 4.7 million inclined sleepers sold by Fisher-Price and a couple hundred-thousand sleepers sold by a few other companies (CPSC, 2022). In 2022 similar concerns led to the recall of an estimated 2 million infant swings and rockers, most of which produced by MamaRoo. Improper design of baby sleeping products has become such an issue that in 2021 Congress passed the Safe Sleep for Babies Act, which outlawed sale of inclined sleepers with an incline of more than 10°.
The Sonmus Sleeper is designed to replace those products in this market space and innovate on the baby sleeper to make it safer while keeping it comfortable and effective at putting babies to sleep. The product includes a rocking function to simulate the cradling motion of being in a caregiver's arms. The rocking frequency can be adjusted and is designed into the natural frequency of the mechanical structure to reduce the power needed to swing. This leads to a low power electromagnetic driver being used to keep the swing rocking. Emotion tracking is being developed to ensure the baby stays comfortable and to help ease the baby to sleep by triggering the rocking function. Finally, motion tracking is integrated as well as a safeguard to ensure the baby does not manage to get itself into a lethal position, as well as to monitor the comfort of the baby.
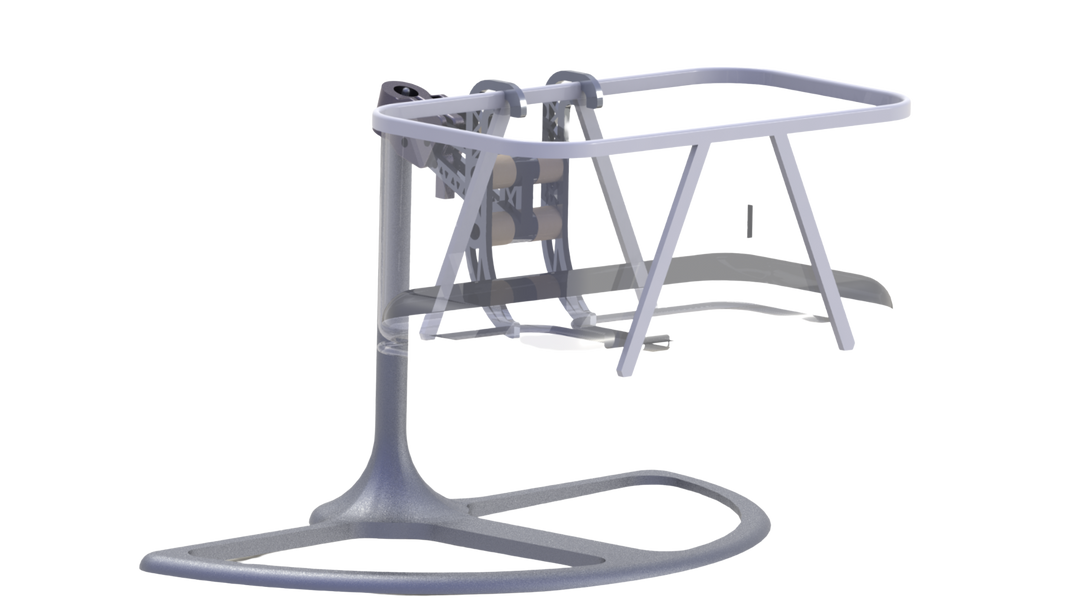
Rocking Design
My direct responsibility was the cradling design and overall mechanical structure of the device.

The four link mechanism allows for the natural frequency to changed between the range of .375 to .625 Hz, the proven best frequency to put a baby to sleep, while keeping the bassinet level with the ground.
The bassinet armature is designed as Vertical G Pendulum, which moves similarly to a caregiver cradling the baby in their arms. The natural frequency of the device can be changed by modifying the angle of the pendulum from the ground


The Road Runner
During the first major project class of the ME curriculum, students are tasked with designing and building an autonomus robot to complete a series of challenges. This robot was tasked with throwing two ping pong balls at and into a 5 gallon bucket. Then it had to move and pick up three more ping pong balls and place them into an array of red solo cups. The robot had to be designed around a limited budget of $100, size restraints, and a limited quatity/selection of solenoids, motors and mousetraps.
To achieve these taks the robot first launches a ping pong ball via a calibrated mousetrap catapult into the bucket and a solenoid releases a ping pong ball to roll at the bucket. then a motor connected to the rear wheels drives the robot forward as it collects the three balls into trays that funnel down to a motor operated elevator shaft. This elevator releases the balls onto an solenoid operated extendable ramp which dispenses the balls into the array of cups.
The robot was created/assembled using hand fabrication, laser cutting and 3D rpinting. The robot was programed using Arduino. A full run can be seen below.

Fuel injector validation rig
With the introduction of a new line of diesel injectors, The modular validation equipment needed new hardware to adapt to the new injectors. I developed and created the technical drawings for the adapter going onto the flow validation rig. This machine activated the electromagnet used to open and close the valve and measured the travel of the valve to then calibrate the injector to the correct flow rate. The adapter needed to withstand large compressive forces as well as resist any movement/rotation of the injector while the machine calibrated the part. The resulting part is precision machined to hundreths of inches and then hardened. The adapter is equipt with a proximity sensor to detect the body of an injector as a safegaurd and a solenoid to lock the injector in place.
Proximity Sensor

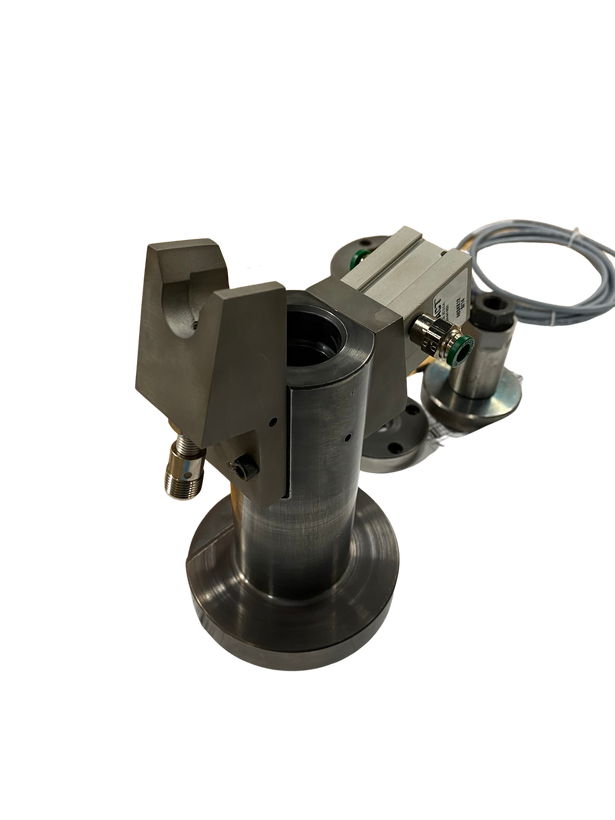
Solenoid Piston
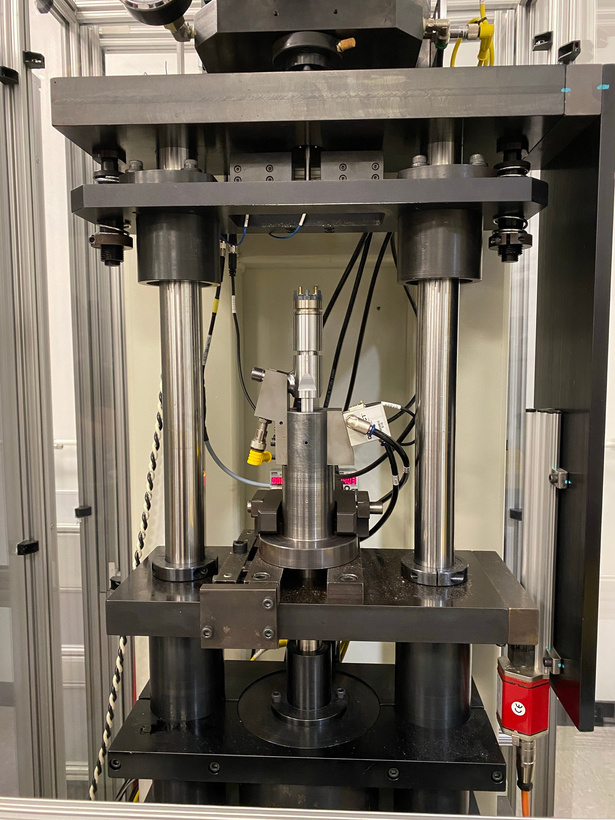
Injector and Adapter in the Validation Rig
Mass production validation rig
In order to increase production of fuel injectors at a factory in China, The fluids metrology department designed and built a new validation rig to validate the function of the injectors. Personally, I was responsible for designing the 8020 enclusure and various mounting firxtures as well as sourcing of many of the validation rigs bought parts.


Automation Installations
To the right is a collection of custom fabricated and programmed manufacturing automation equipment using Haas Mills and Universal Robotics Cobot units.
From top:
Dual ROBOTIQ force adjustable grippers with vision system demo. The system mimics using vision to load and unload parts into a SCHUNK vice equipt CNC mill. I was part of a two person team responisble for programming and teaching the demo.
Custom designed adapter and end effector for schunk vice gripper to load and unload a 5TH AXIS system demo. I was personally responsible for the design/manufacture of the end effector, a well as part of the programming.
ROBOTIQ vaccum suction demo palletizing and de-palletizing boxes. I was directly responsible for the programming of the demo.

2 sets of 3 axis milled aluminum grippers with for both raw stock and finished product

3D printed air hose nozzles
5 axis milled aluminum adaper plate to mount two SCHUNK grippers 45 degrees from one another

Personal Projects
These four rings (below) were created using traditional wax carving techniques and then cast in silver(top) and bronze(bottom).
To the right is a sketch of Hydra by Raphael Sanzo done in pencil

Technical Drawing Sample